


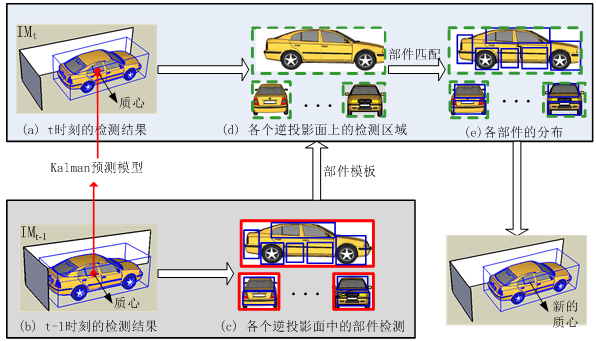
基于3D部件混合模型的车辆目标跟踪,以三维空间中目标(车辆)的质心作为跟踪的轨迹点,利用目标模型中的多个逆投影面的部件匹配,实现基于部件模板的车辆目标的跟踪,根...
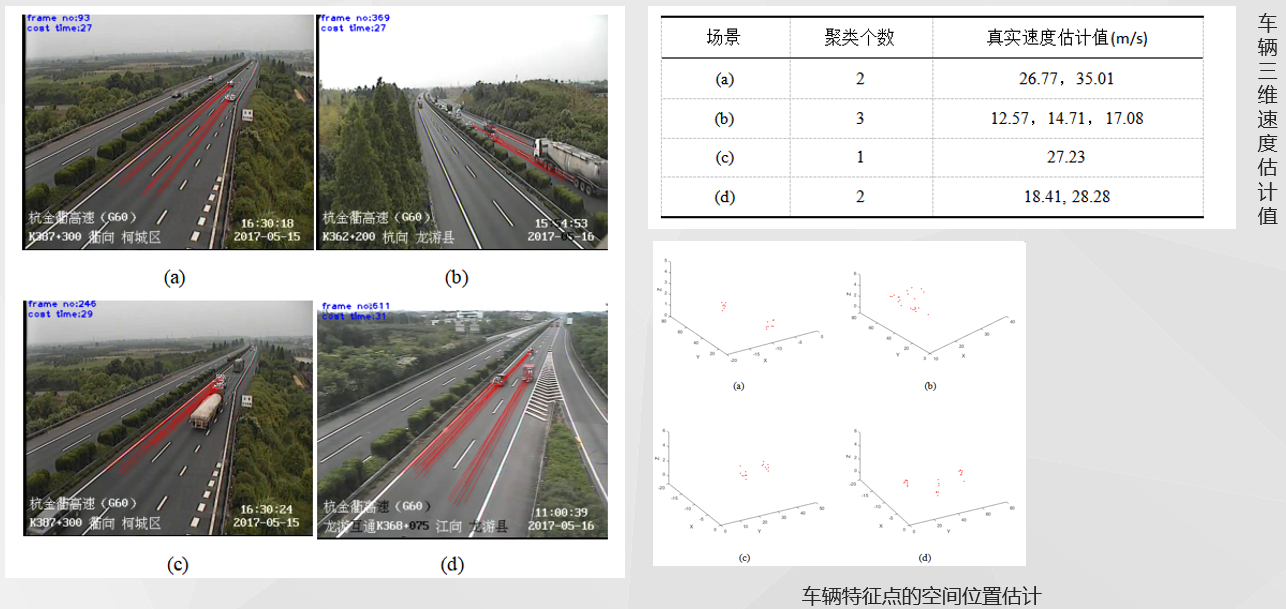
为了更好的解决复杂交通场景中车辆目标的分割问题,研究了车辆特征点轨迹的刚性运动约束,并进一步估算了车辆特征点轨迹的3D信息。具体地,首先利用监控场景的先验知识...
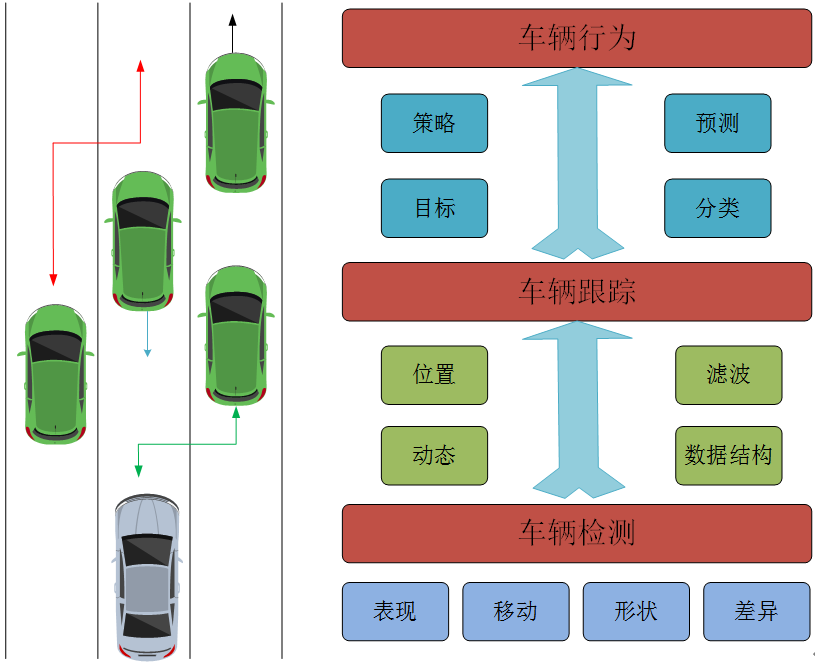
在最低级别,车辆的各种静态特征被提取并用于车辆目标的检测与分割。第二级别,根据检测到的车辆实现其在帧间的连续跟踪,并测量该车辆的各种动态特征并获取该路段的交...

该项目中,项目组提出了适用于车轮定位应用的计算机视觉全局标定、测量平面修正、动态补偿解决方案,提高了设备检测的精度及一致性;结合双目立体视觉非接触式测量技术...
Copyright (C) 2015-2020 烟台大学计算机与控制工程学院 鲁ICP备37061302000289
